


三相交流回路の「RST」と「UVW」の違いについて
nabechang007 nabeWorks
工場内にある設備やクレーンなど、装置を目的の位置に停止させる為には様々な検出器が使われます。
ロータリエンコーダもその一つで、回転する機器の回転量は回転するスピードを検出することができます。
この記事ではそんなロータリエンコーダの構造やメリットとデメリットについて徹底解説していきます。

僕がメンテナンスしている設備にも沢山使われているよ。

モータやボールネジなど、回転させて駆動する機器の位置決めにロータリエンコーダはよく使われています。
スポンサーリンク
ロータリエンコーダは回転する機器に直結させて一緒に軸を回転させることで、回転した量や回転するスピードを信号として取り出せる検出器です。
引用先:MISUMI(ロータリエンコーダE40シリーズ)
一見するとモータような形をしていますね。
エンコーダから出ている軸を回転している機器にカップリング等で接続して一緒に回転させて使います。
エンコーダを回転させると信号が出力されてくるので、PLCなどの制御機器でその信号を受け取って位置決めなどの制御を行います。

ロータリエンコーダには大きく分けて次の2種類があります。
インクリメンタル形は軸の回転量に応じてパルス信号が出力されてくるタイプのエンコーダです。
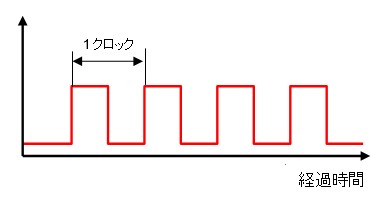
パルス信号とは短い間隔でON・OFFを繰り返す電気信号のことを言います。
引用先:即戦力モノづくり!エンジニアへの道標(マイコンで使うパルスについて)
グラフで表すと上の図のようになります。例えるなら、手を叩いて「パン・パン・パン」とリズムをとるようなものですね。
このパルス信号の数はエンコーダの軸を回した量に応じてきっちりと出力されます。また、軸を速く回すと出てくるパルス信号のスピードも速くなります。
つまり、このパルス信号の数を数えることでエンコーダがどれだけ回されたかが分かりますし、パルス信号の入ってくる間隔の速さでエンコーダがどれだけの速さで回されているかが計算できます。
これがインクリメンタル形のエンコーダになります。
アブソリュート形は軸の回転量を絶対値でパラレル出力するタイプのエンコーダです。
インクリメンタル形は単純にパルス信号を出すだけなのに対し、アブソリュート形は軸が回転した量(角度)をエンコーダが制御装置に教えてくれます。
なので、制御装置がエンコーダの回転量を計算したりしなくても、どれだけ回されたかがエンコーダを通して分かるという仕組みになっています。
アブソリュート形は次のように回転量を出力します。
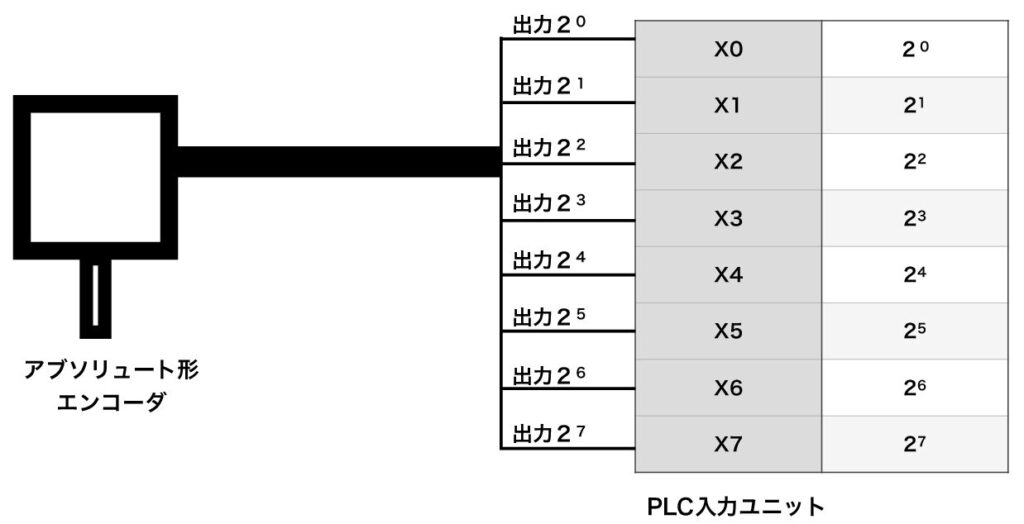
図のエンコーダからは「出力20」から「出力27」までの信号線が出ていて、PLCの入力ユニットに一本ずつ接続されています。※信号線の数は機種によって異なります。
例えばエンコーダが「1」という回転量を出力する場合は、「出力20」の信号のみを出力し、他の信号は出力しないようにします。すると「20」の答えは「1」になるので、PLCは今エンコーダは「1」回転したんだなということが分かります。
他にも、エンコーダが「100」という回転量を出力する場合は、「出力22」と「出力25」と「出力26」の信号を出力して、他の信号は出力しないようにします。これを計算すると、4(=22)+32(=25)+64(=26)=100になるので、PLCは今エンコーダは「100」回転したんだなということが分かります。
この一連の信号出力を回転しながら行っているのがアブソリュート形のエンコーダです。
アブソリュート形は現在位置を絶対値で教えてくれるところが最大の特徴だね。
スポンサーリンク

ロータリエンコーダは次のような仕組みになっています。
引用先:旭化成株式会社(インクリメンタル方式とアブソリュート方式)
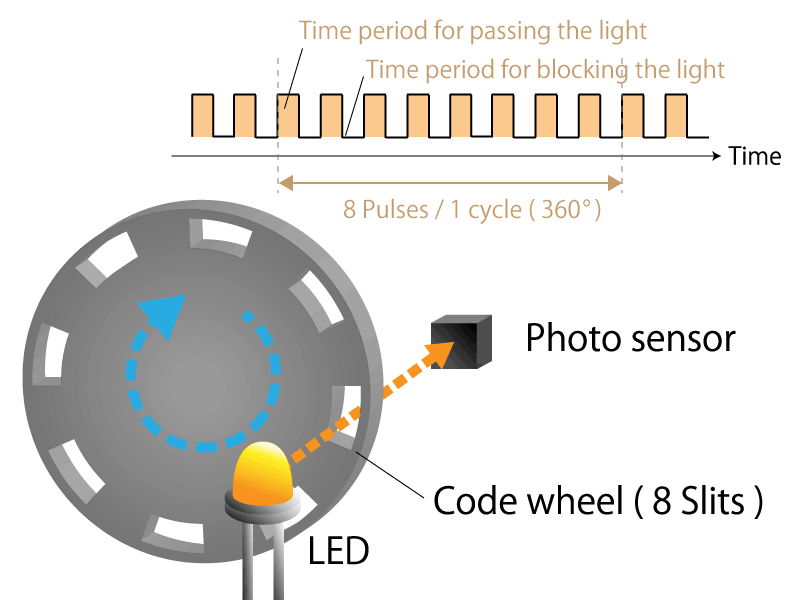
インクリメンタル形エンコーダの仕組みを簡単に表したものが上の図になります。
エンコーダの軸にはスリットと呼ばれる穴があいた円盤が取り付けられており、軸を回すと円盤が回転します。そして円盤のスリットを光軸が通るようにLEDと光電センサが取り付けられています。
この円盤を回してLEDの光がスリットを通過すると、光電センサが光を検出して信号を出力します。【ON】
更に回すとスリットの無い部分がLEDの光を遮ってしまうので、信号が出力されなくなります。【OFF】
この信号のON・OFFの繰り返しがパルス信号となってエンコーダから出力されるわけですね。
ちなみに、インクリメンタル形のエンコーダの回転方向をどうやって検出するかというと、次の図のような仕組みで検出しています。
引用先:旭化成株式会社(インクリメンタル方式とアブソリュート方式)
引用先:旭化成株式会社(インクリメンタル方式とアブソリュート方式)
インクリメンタル形のエンコーダにはA相とB相の2種類のパルス信号があり、LEDと光電センサをそれぞれ1/4ピッチずらして配置されています。
この配置でエンコーダを回すと、A相とB相のどちらかが先にパルス信号を出力するので、その順番によって回転方向が分かるようになっています。
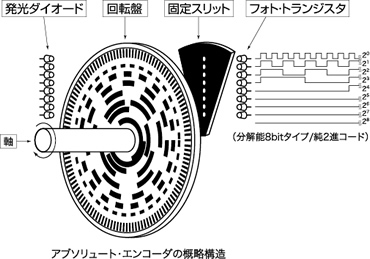
引用先:多摩川精機株式会社(ロータリーエンコーダ 概要・技術解説)
アブソリュート形エンコーダも基本的にはスリット入りの円盤やLED・光電センサを使用しますが、インクリメンタル形よりも複雑な構造をしています。
円盤のスリットは回転量を絶対値出力できるように複雑かつ細かくパターンが刻まれており、LEDと光電センサの数も出力する信号線分配置されています。
この円盤を回していくと、複雑なスリットパターンがLEDから出た光を通過させたり遮ったりして都度その時の回転量を出力します。
この出力されたLEDの組み合わせを制御装置側が計算することで、エンコーダの回転量が絶対値で分かるという仕組みです。
アブソリュート形エンコーダの中には、機械的・電気的な仕掛けによって1回転以上円盤が回っても絶対値出力が可能な多回転タイプも存在します。
引用先:エヌエスディ株式会社(1回転型アブソコーダ検出器VRE)
その他のエンコーダとして「アブソコーダ」をご紹介しておきます。
アブソコーダはエヌエスディ株式会社が製造しているロータリエンコーダの商品名で、アブソリュート形に分類されます。
アブソコーダは光学的な仕組みではなく電磁的な仕組みで回転量を検出しています。
引用先:エヌエスディ株式会社(回転型アブソコーダの基本原理)アブソコーダの構造図
引用先:エヌエスディ株式会社(回転型アブソコーダの基本原理)アブソコーダの原理図
アブソコーダは4つのコイルと偏心した鉄のローター軸で構成されています。
この軸を回すと軸とコイルの位置関係を電磁的な仕組みでアブソコーダ側が検出して角度θを算出します。
検出された角度θは専用の変換器で様々な出力方式に変換され、PLCなどの制御装置側に回転位置情報を出力することが出来ます。
引用先:エヌエスディ株式会社(バイナリ・グレイコード出力変換器 NCV-20N)
上記のような「バイナリ・グレイコード出力変換器」に専用ケーブルでアブソコーダと接続すれば、光学式のアブソリュート形エンコーダと同じような間隔で回転量を得ることが可能です。
アブソコーダにも多回転タイプ「MREシリーズ」があります。
アブソコーダは外装がかなり頑丈なので、外部からの衝撃などで破損させない限りは壊れることが少なく、悪環境でも問題なく使用が可能です。実際、製鉄所内の設備やクレーン等でも数多く使われています。

ロータリエンコーダはシーンに応じたスペックのものを選定する必要があります。
ロータリエンコーダを選定する上で欠かせないのが「分解能」です。
分解能とは「P/R」の単位で表され、1回転あたり何パルス出力できるのかを示します。
例えば分解能が1,000P/Rのロータリエンコーダだとすると、軸を1回転回したらちょうど1,000パルス出力される機種ということになります。
分解能が高いエンコーダは高精度と言えますが、その分価格が高くなります。
また、インクリメンタル形の場合はノイズによるパルス飛び(制御装置がパルス信号を受け取り損ねる)が発生するリスクが増えます。
なので、不必要に高い分解能のものを選定しないようにすることが大切です。
ロータリエンコーダは機種によって許容できる最高回転数が決められています。
単位は「r/min」で表され、1分あたりに何回転するスピードなのかを示しています。
一般的には5,000〜6,000r/min程ですが、機種によっては1,000r/minぐらいしかないものも存在します。
なので、一緒に回転させる相手(駆動軸)とエンコーダの組み合わせをよく検討してから選定するようにしてください。
インクリメンタル形エンコーダにはメリットとデメリットがそれぞれ存在します。
インクリメンタル形エンコーダは、単純な構造をしていることや部品点数が少なめであることから比較的安価です。
外装が頑丈で高価なものも中には存在しますが、全体的な傾向としては1〜3万円までで手に入ります。
インクリメンタル形エンコーダの配線は電源線2本とA相B相1本ずつ、必要であればZ相1本の計4〜5本で済みます。
なので、分解能が高い機種であっても配線は少なくて済みます。
入ってくるパルス信号を積算するという単純な仕組みなので、制御としては比較的簡単に情報を処理することができます。
アブソリュート形よりもインクリメンタル形の方がよく使われてるね。
インクリメンタル形エンコーダで位置制御する場合、制御装置側で常にパルス値を数えて制御するので、電源が切れてしまうと位置が分からなくなります。
エンコーダからパルス信号が途絶えたり、制御装置側で数えられなくなる為ですね。
なので、この場合はパルス値を数え始めるスタートの位置まで装置を動かさなくてはならない手間が発生します。
ノイズの影響により、エンコーダ側から出力されたパルス信号と制御装置側に入ってくるパルス信号にズレが生じる場合があります。
僕自身、毎回装置の止まる位置が変わったり、目的の位置まで動作しないといったことを経験したことがあります。
エンコーダと制御装置間の配線についてはしっかりとしたノイズ対策が不可欠です。
インクリメンタル形エンコーダのパルス信号は、PLCなどの入力ユニットにそのまま接続してもうまくカウント出来ません。
エンコーダからは一瞬で何百何千というパルス信号が入ってくるので、普通の入力ユニットでは追いつかないからです。
その為、高速カウンタユニットという特殊ユニットを準備してそれに接続する必要があります。
インクリメンタル形はパルスを確実にカウントできる環境を整えることが不可欠です。
スポンサーリンク

アブソリュート形エンコーダについてもメリット・デメリットが存在します。
アブソリュート形エンコーダで最も大きなメリットがこれですね。
アブソリュート形の場合は、今の回転位置がどの位置なのかを仕組みで分かるようにしているので、電源が切れた状態で軸が動いたとしても位置が分からなくなるということが有りません。
電源を入り切りしてもエンコーダ側からは絶対値で常に制御装置側に位置を出力しているので、上手にソフトを組むことさえできれば、装置をいちいち元の位置に戻さなくても停止した位置から運転を再開するといったことが可能になります。
パルス信号を数える方式ではなく、回転位置を絶対値でエンコーダ側から教えてくれる方式なので、ノイズに邪魔されてパルス信号が飛ぶといった不具合が発生しにくいです。
エンコーダ側から入力される回転位置の情報は、PLCの普通の入力ユニットにそのまま接続して得ることが可能です。
ただし、アナログ信号で回転位置を出力するような機種の場合は、別途特殊ユニットが必要になります。
設備を使用する方にとってはメリットの多いロータリーエンコーダです。
アブソリュート形エンコーダは構造が複雑ゆえ、部品点数が多く比較的高価になります。エヌエスディのアブソコーダについては、本体だけでなく専用ケーブルや変換器など本体以外の機器も揃える必要があります。
アブソリュート形は構造上何回転もさせるような用途にはあまり向きません。
多回転タイプもありますが、数十〜数百回転させて位置決め制御をするといった用途にはインクリメンタル形の方が使いやすいです。
短い距離を行ったり来たりする装置など、ある程度限られた動作範囲の中で位置決め制御をするような場合にアブソリュート形エンコーダは有効的と言えるでしょう。
回転量をパラレルで出力するという構造上、インクリメンタル形と比べて配線数は多くなります。
何らかのトラブルや補修作業でエンコーダと駆動部を切り離さなくてはならなくなった場合、マーキングを付けたところからわずかにズレることがあります。
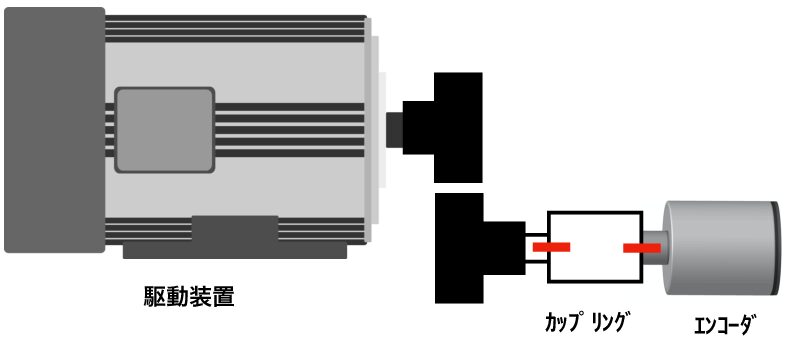
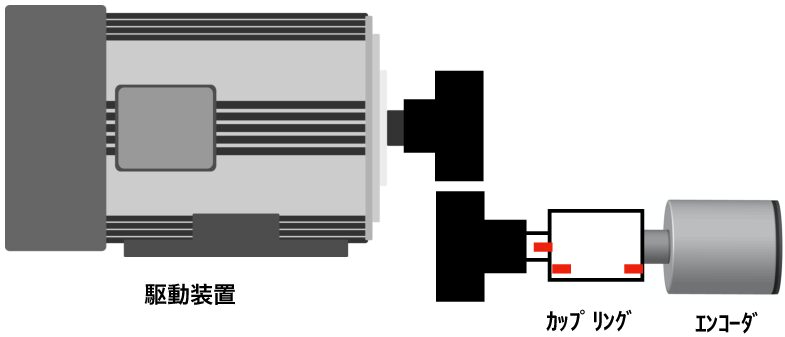
切り離す前のマーキングからわずかでもズレると、今までの位置関係が全てズレてしまいます。
インクリメンタル形の場合は、エンコーダと駆動部の位置関係がズレたとしてもあまり影響は有りません。ただ、アブソリュート形の場合はエンコーダと駆動部の位置関係がズレると、停止位置が変わってしまいます。
これを防ぐには、切り離す前の回転位置と切り離して再度復旧したときの回転位置が合うように、カップリングの部分を調整する必要があります。
実際、このような作業を現場で何回も行った経験が僕自身あって、とても面倒くさい思いをしたことがあります。
これについては、ソフトの組み方と仕組みでカバーすることは出来ますが、そのような機能がない設備については都度調整作業が発生します。
保全する人にとってアブソリュート形は少し取り扱いが大変かな〜。

以上、ロータリエンコーダについて種類や仕組み、その特徴などについて解説しました。
ロータリエンコーダは方式や機種によって様々な特徴があります。それらの特徴をうまく利用して、シーンに応じた使い分けをしてください。