【近接センサって何?】動作原理とその使い方について解説
nabechang007 nabeWorks

様々な産業機械の速度制御に使われているインバータ。
モーターの速度制御を行うインバータは様々なメーカーが作っており、三菱電機もその中の一つです。
インバータはモーターに供給する電源の周波数を変えて速度制御を行う制御機器ですが、その制御方式にも様々な種類があることをご存じでしょうか?
その中のひとつが、三菱電機製インバータに搭載されている「磁束ベクトル制御」です。
磁束ベクトル制御とはどのような制御方式なのでしょうか、またどのようなメリットがあるのでしょうか。
この記事ではそれらの疑問についてお応えしていきます。

インバータの一般的な制御方式って「V/F制御」だよね?
「磁束ベクトル制御」って何が違うんだろう?

「磁束ベクトル制御」は上手に活用することで様々なメリットを享受できますよ

スポンサーリンク

まずはインバータの速度制御で最も一般的な「V/F制御」についておさえておきましょう。
V/F制御とは、インバータから出力されてくる電圧【V】と周波数【F】の比が一定になるように制御を行う方式のことを言います。
例えば、インバータの電源電圧が200Vで基本周波数が50Hzだとすると、インバータは電圧200Vと周波数50Hzの比が一定になるように制御しようとします。
周波数が40Hzの場合は、基本周波数50Hz・基準電圧200Vを基に計算すると、200V÷50Hz=4V/Hzとなるので、4×40=160Vが出力されます。
また、周波数が10Hzの場合は、出力電圧は4×10=40Vとなります。
このように、V/F制御では周波数に応じて出力する電圧を変えることで、常にV÷Fが一定になるように制御しています。
では、なぜ周波数に応じて電圧を調整しているのでしょうか?

周波数に対して電圧を変えてV/Fを一定に保とうとする理由は、「磁束」を一定に保つためです。
「磁束Φ」は電圧と周波数を用いると次の式で表されます。
-pdf.jpg)
上の式では、Φは磁束・Vは電圧・fは周波数・Nはコイルの巻数となります。
ここで、コイルの巻数(インバータに接続するモーターの巻数)や「4.44」の定数は一定と考えると、「磁束Φ=V/F」と表現することもできます。
よって、V/Fの比を一定に保つことによって、結果的に磁束Φも一定に保たれるというわけですね。

磁束Φを一定に保つ理由は安定したモータートルク(回転する力)を得るためです。
磁束Φを用いてモーターのトルクTを計算するには以下の式を使います。
-pdf.jpg)
トルクTは磁束Φと電流Iの積であることから、磁束Φを一定に保つことで安定したモータートルクを得ることができます。
特に誘導モーターでは磁束が変化するとトルク特性が不安定になって効率が低下するため、磁束を一定に保つことはモーターの効率や安定動作に不可欠です。
このように、周波数に応じて出力する電圧を調整することで適切なトルクでモーター駆動を行う制御が「V/F制御」です。
各社のインバータの基本的な制御はV/F制御です

三菱電機製インバータに搭載されている「磁束ベクトル制御」とはどのようなものなのでしょうか。
磁束ベクトル制御とは次のような演算をしてモーターを制御しています。
インバータからモーターに出力される電流(モーター電流)をインバータが計測し数値化します。
モーター電流の数値が分かったら、これを励磁電流(磁束を作るための電流)とトルク分電流(トルクを発生させる電流)とに、それぞれの成分を分割します。
分割にはベクトル演算という電流の向きと大きさを使って行う計算方式を使用します。
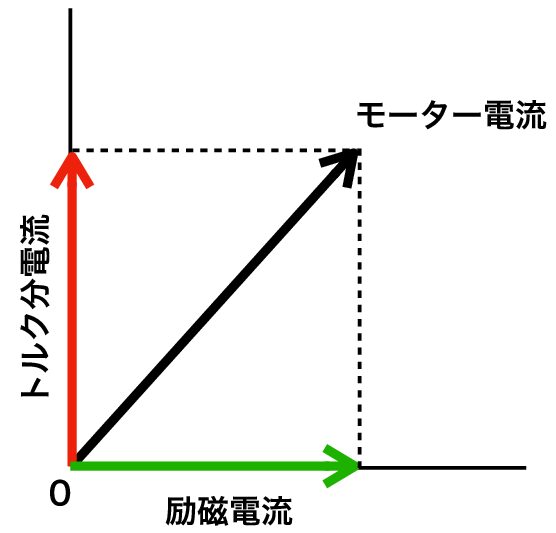
赤い矢印の成分がトルク分電流で緑の矢印が励磁電流となります。この演算によって算出したトルク分電流を使って制御を行います。
トルク分電流の数値が分かったら、この数値から現在モーターがどれぐらいの速度で回転しているかを計算します。もし、設定した周波数と計算上の回転速度がズレていたら、周波数を微調整します。
そう言えば、磁束ベクトル制御で動いているインバータの表示は周波数がパラパラ変わってたね
インバータからモーターへ出力される電圧は、様々な抵抗成分によって実際には少し低くなります。この電圧降下は、外部要因などでモーター電流が変化するとトルクを発生させる磁束に影響を及ぼします。
この磁束を一定に保つために、抵抗成分などの情報やトルク分電流から出力する電圧を補正します。
これによって低速域でも高いトルクをキープすることができます。

磁束ベクトル制御ではモーターのトルク分電流を演算で算出し、それを使って様々な計算をして制御しています。ただ、計算を行うにはトルク分電流の数値以外にも、接続されているモーターに関する種々の情報をインバータが持っている必要があります。
これらの情報をどうやって所得しているのでしょうか?
磁束ベクトル制御ではインバータにモーターを接続したあと、モーターの仕様(容量・極数等)をパラメータとして入力します。これによって、どのようなモーターを使おうとしているのかをインバータに教えます。
ただ、これだけでは演算で使用する情報の正確性に欠けます。モーターの特性や個体差、配線長等の現場条件によって、同じモーターでも抵抗値などの情報が変わる可能性があるためです。
そこで、これらの情報を得るために行われるのが「チューニング」という作業です。
チューニングとは、接続されたモーターの情報を得るためにインバータが行う測定作業のことで、これによって演算で使用する様々な情報を正確に所得することができます。
チューニングによって得られた情報を使うことで、より精度の高い制御を行うことが可能となります。
引用先:三菱電機(FR-A820-0.4K-1 特徴)
三菱電機製インバータには他にも磁束ベクトル制御の種類があります。
「汎用磁束ベクトル制御」は磁束ベクトル制御のうち「周波数を微調整する」機能を省いた制御方式です。
この制御方式は、最低限の情報(モーター容量・極数)を入力するだけで使用できるため、難しい操作を必要としないのが最大のメリットです。
反面、通常の磁束ベクトル制御よりも制御の精度が低いというデメリットがあります。
「アドバンスト磁束ベクトル制御」は通常の磁束ベクトル制御よりも少し高機能な制御で、より高い低速トルクと高い速度精度を兼ね備えています。
また、「オンラインオートチューニング」という、モーターの温度上昇による特性変化の影響を受けないよう、モーター始動時にチューニングするという機能を有しています。
設定や事前のチューニングなど若干面倒な面はありますが、負荷変動が激しいモーターなどを安定して動作させたい場合などには非常に有効的です。
スポンサーリンク
磁束ベクトル制御には次のようなメリットがあります。

V/F制御では周波数が低い低速域においては電圧も低くなるため、電圧降下分も相まって十分なトルクが出ないという欠点がありました。
磁束ベクトル制御では、1〜3Hzというような低い周波数での低速域においても、高いトルクを発生させることが可能です。
V/F制御と磁束ベクトル制御では、低速時のトルクが全く違います

磁束ベクトル制御ではトルク分電流から実速度を推定して周波数を補正するため、より設定値に近い速度で運転することができます。
速度精度が高いことで、精密な動作を要求される機器にも適しています。

磁束ベクトル制御はモーターの負荷や状態をリアルタイムで監視・演算しながら運転を行う高機能な制御であるため、負荷変動があっても瞬時に対応することができます。
そのため、モーターに掛かる負荷が増えても速度やトルクが変動しにくく、安定した動作が可能となります。
負荷変動の大きいクレーンの巻上装置や搬送設備にも最適だね

磁束ベクトル制御はインバータの機能の1つであるため、使っているインバータとモーターが対応さえしていれば、使いたい時に設定してすぐ制御方式を切り替えることができます。
僕自身、クレーンの車輪が引っ掛かって動かせなくなるというトラブルが発生した時、一時的に磁束ベクトル制御に切り替えて無理矢理動かして脱出させるという対応をしたことがあります。
緊急時に使う1つの「技」として覚えておくと役に立ちます。
スポンサーリンク
磁束ベクトル制御にもいくつかのデメリットがあります。
磁束ベクトル制御を使うにはいくつか条件を満たす必要があります。
磁束ベクトル制御が使えるモーターの極数は2極・4極・6極の3種類です。
配線長はチューニングを行わない場合は30m、チューニングを行う場合でも500mまでです。
V/F制御の場合はインバータ1台につき複数台モーターを接続することが出来ますが、磁束ベクトル制御の場合はインバータ1台につきモーター1台しか接続することが出来ません。
接続できるモーター容量は、インバータの容量と同じか1つ下までという制約があります。
制御の精度を維持するには仕方のない制約なのかな

これは都市伝説かもしれませんが、V/F制御に比べて磁束ベクトル制御の方がトルクが高くなるため、車輪などの機械部品の摩耗が早まることがあるそうです。
実際に比べたわけではないので真偽は不明ですが、会社によっては磁束ベクトル制御を使わないように指定してくるところもあります。(僕もそのように言われたことがあります。)
V/F制御でも十分な使用用途の場合は、あえて磁束ベクトル制御を使わない方が良いのかもしれません。

磁束ベクトル制御への切り替えには、V/F制御のパラメータ設定に加えて指定された項目の設定変更が必要です。
また、パラメータ設定が全て終わったあとにチューニング作業が必要になるため、あまりインバータを触る機会が無い人にとっては、少しハードルの高い作業となります。
特にチューニングには「モーターを回転させて行う」と「モーターを回転させないで行う」の2パターンがあり、これもどちらを選んで良いのか悩むポイントにもなっています。
「モーターを回転させて行う」場合は、ブレーキを開放して定格速度まで回転しても問題ない状態にしておく必要があるため、僕はあまりお奨めはしません。
チューニング精度が多少落ちたとしても、「モーターを回転させないで行う」の方でチューニングを行う方が良いと思います。
取扱説明書通りにやれば必ずできます

以上、磁束ベクトル制御について解説しました。
磁束ベクトル制御はV/F制御と比べて、低速域の高トルクや速度精度の高さなど、優れた特徴を持つとても高機能は制御方式です。
パラメータ設定やチューニング作業に一定の知識は必要になりますが、一度覚えてしまえば様々な場面で必ず役に立ちます。
磁束ベクトル制御のメリット・デメリットを理解して、適切に活用していきましょう。