
【防爆構造とは?】規格や種類、特徴について分かりやすく解説
nabechang007 nabeWorks
ステッピングモーターは電気の力で動作するモーターの一種で、工場の設備だけでなく自動車や精密機械など、私達の身の回りにある製品にも広く用いられています。
例えばプリンターや一眼レフカメラのレンズ、トイレのウォシュレットにもステッピングモーターが使われています。
ただ、ステッピングモーターは一般的なモーターとは異なる仕組みで回転するため、基本的な動作原理や構造を知らないという方も多いのではないでしょうか。
この記事では、ステッピングモーターの基本原理や構造、メリット・デメリットについて初心者の方でも分かりやすく解説していきますので、是非参考にしてみてください。

私達の生活はステッピングモーターに支えられていると言っても過言ではないかもしれませんね。
ステッピングモーターとは、電気のパルス信号を与えることで回転速度と回転角度を細かく制御できるモーターです。
パルス信号とは「電気のオンとオフを繰り返す信号」のことを言います。

このスイッチのオンとオフを素早く繰り返すと下の図のような波形になります。
このような信号をパルス信号と言います。
ステッピングモーターは、このパルス信号を素早く与えれば速く動き、ゆっくり与えれば遅く動きます。
また、パルス信号を100回与えれば100回分モーターが回転し、1000回与えれば1000回分モーターが回転します。
このような動きをするのがステッピングモーターです。

パルス信号は「拍手」をイメージすると分かりやすいかも
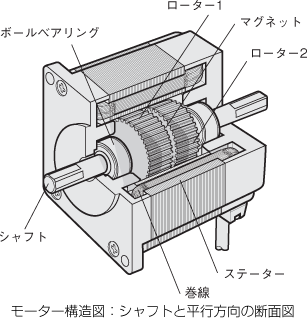
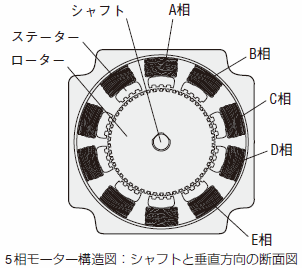
ステッピングモーターは以下のような構造になっています。
引用先:オリエンタルモーター(ステッピングモーターの構造)
ステッピングモーターはシャフトの付いたローター(回転子)と、巻線が巻かれたステーター(固定子)で構成されており、シャフトは両端にあるボールベアリングで支持されているため、くるくると回転するようになっています。
こうして見ると、一般的なモーターと造り自体はよく似ていますね。
ただ、ステッピングモーターの場合はローターとステーターが少し特殊な構造をしています。
引用先:オリエンタルモーター(5相ステッピングモーターの構造)
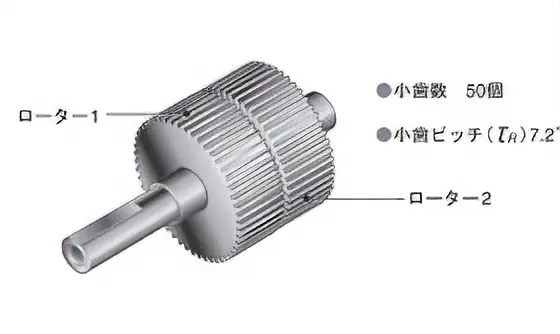
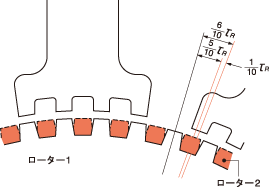
ローターはローター1とローター2に分かれており、表面には小歯と呼ばれるギザギザが規則的に並んでいます。
引用先:SKYS Motor(HB型モーターの構造と動作)
この小歯はローター1とローター2で数は同じですが、歯を半ピッチずらして取り付けられています。
引用先:オリエンタルモーター(ステーターの構造)
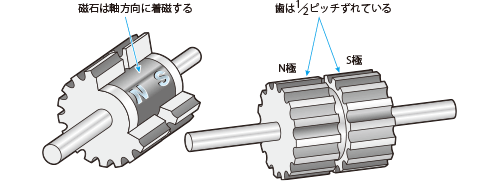
ローターを横から見ると、図のようにローター1の山谷とローター2の山谷が交互に重なるような配置になります。
このローターには永久磁石が組み込まれており、図のローターの場合はローター1にN極の磁石、ローター2にS極の永久磁石がそれぞれ内蔵されています。
引用先:オリエンタルモーター(ステッピングモーターの構造)
ステーターにもローターと同様に小歯と呼ばれるギザギザがあり、各ステータは向かい合うように配置されています。
この対向するステータコイルに電流を流すと、片方がN極もしくはS極、もう一方はS極もしくはN極となるよう「相」が形成されています。
この相が2相あるものを「2相ステッピングモーター」、5相あるものを「5相ステッピングモーター」と呼びます。
この他にも様々な種類のステッピングモーターがあります。
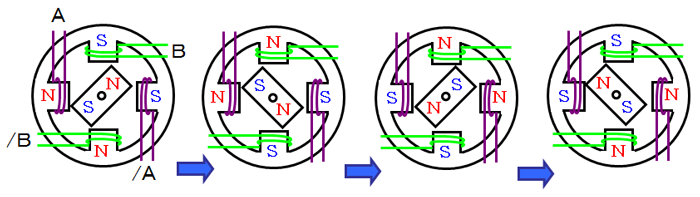
ステッピングモーターの基本的な動作原理は以下の通りです。
引用先:日本パルスモーター株式会社(ステッピングモーターとは)
ステッピングモーターは電磁石化させたステーターでローターを引き寄せることでローターを回転させています。
まず、図の「赤巻線A」の相に電流を流してステーターの一方をN極、もう一方がS極になるよう磁化させます。
すると、永久磁石であるローターのN極がステーターのS極、ローターのS極がステーターのN極に引き寄せられて少しだけ回転します。
次に、「緑巻線B」の相に電流を流して、同じようにS極ーN極の相を形成します。
今度はローターが緑巻線Bのステーターに引き寄せられるので、ローターが更に少し回転します。
この流れを繰り返すことでローターが一方向に回転していきます。これがステッピングモーターの基本的な動作原理になります。
ここまで説明したステッピングモーターの構造や基本原理を踏まえて、実際のステッピングモーターがどのようになっているのかを解説していきます。
引用先:オリエンタルモーター(RKⅡシリーズ)
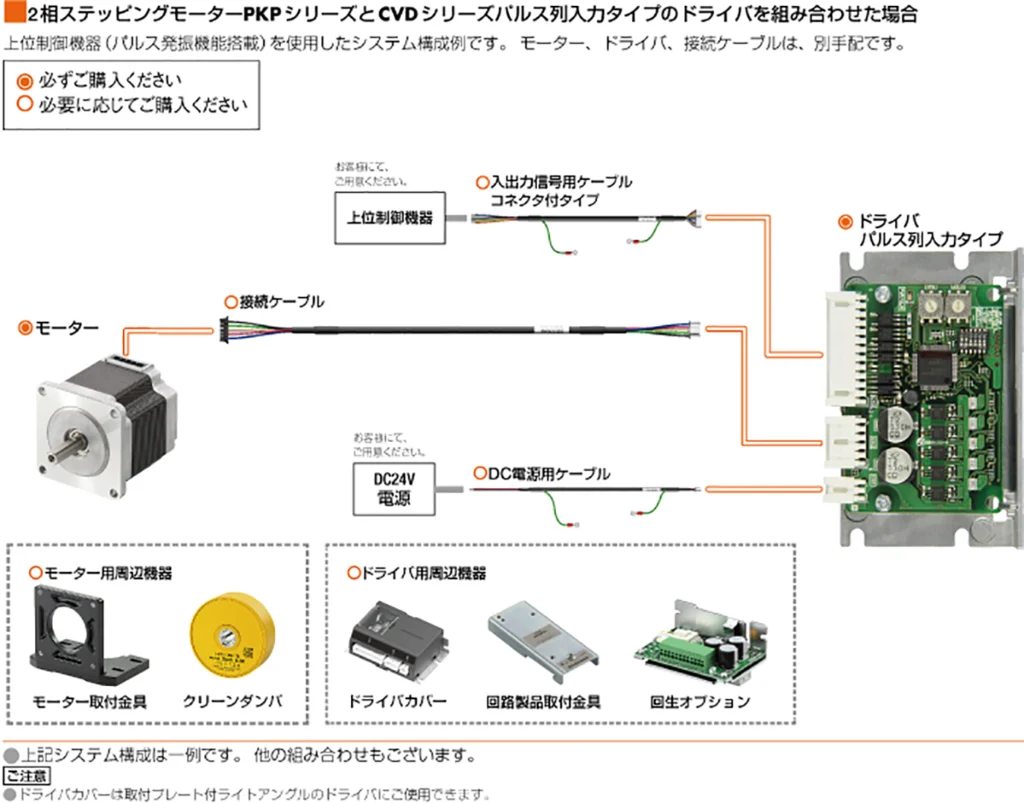
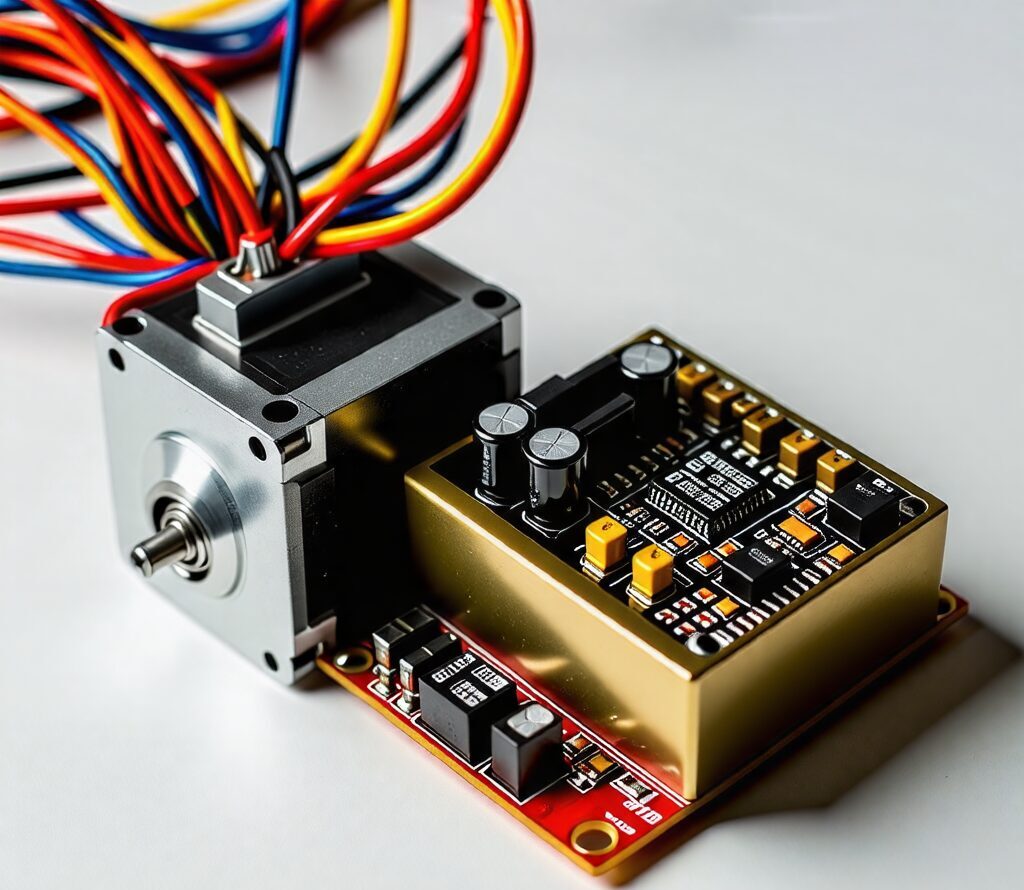
ステッピングモーターはモーター単体で使うことはできません。モーターを制御して動かすための「ドライバ」が必要になります。
引用先:オリエンタルモーター(ステッピングモーターPKPシリーズ/CVDシリーズパルス列入力タイプドライバシステム構成)
図のように、ドライバにステッピングモーター・電源・動作信号の配線等を接続して使用します。
ドライバはステッピングモーターの基本原理である「ステーターの巻線を磁化してローターを引き寄せる」という制御を行っており、ドライバに入力されたパルス信号に応じてモーターを回転させてくれます。
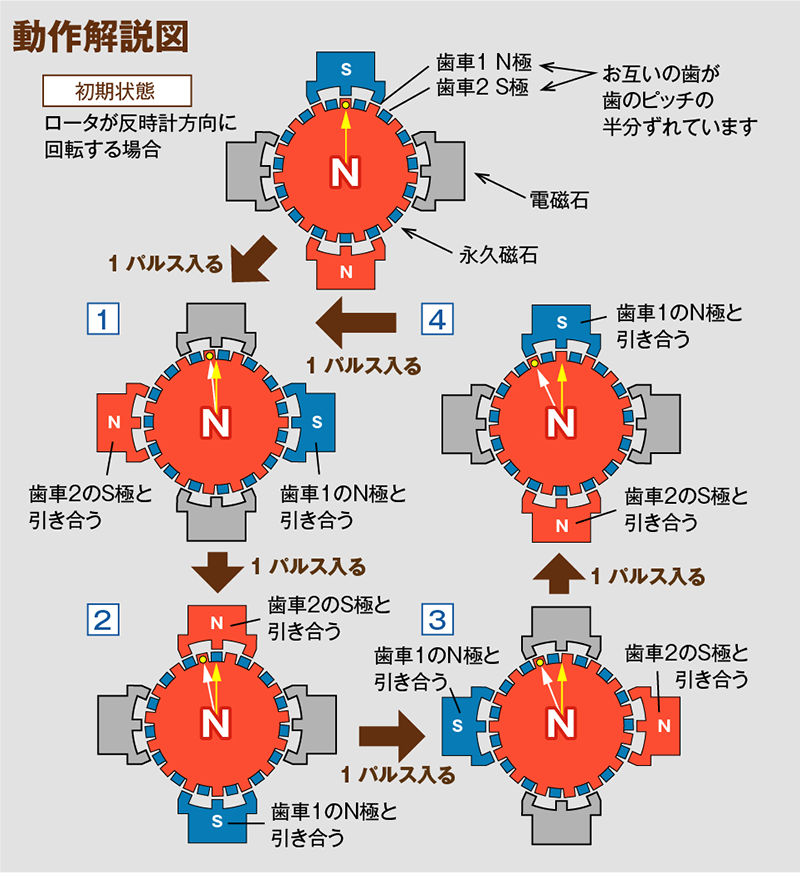
ドライバにバルス信号を入力すると、ステッピングモーターは次のように動作します。
引用先:株式会社エムジー(ステッピングモーターが高精度なわけ)
ステーターが磁化され、N極であるローター1はステーターのS極に、S極であるローター2はステーターのN極にそれぞれ引き合って固定されます。
ローター1とローター2の小歯が半ピッチずらしてあるので、磁化されたステーターの小歯とローターの小歯がピッタリ合うようになっています。
ドライバにパルス信号を1パルス入れると、ドライバは次のステーターを磁化してS極ーN極を作ります。
すると、ローターの小歯が磁化されたステーターの小歯に引き寄せられて、半小歯分ローターが回転します。
ドライバにパルス信号をもう1パルス入れると、ドライバは更に次のステーターを磁化してS極ーN極を作ります。
この磁化されたステーターの小歯にローターが引き寄せられて、合計1小歯分ローターが回転します。
このサイクルを繰り返すことで、「1パルス=0.5小歯分」ステッピングモーターを回転させることができます。
これが実際のステッピングモーターの動作になります。
ステッピングモーターを使うメリットについてお伝えします。
ステッピングモーターは1パルスにつき半小歯分動作するのですが、2相ステッピングモーターの場合は1パルス当たり1.8度、5相ステッピングモーターの場合は1パルス当たり0.72度という非常に小さい角度で回転します。
なので、小さな回転角度で制御したい場合であっても、非常に細かく位置決めを行うことが可能となります。
ステッピングモーターは入力したパルス数に応じて決まった角度(小歯分)で回転します。
例えば3,600パルスで1回転するステッピングモーターであれば、900パルス入力すれば90度だけ回転しますし、7,200パルス入力すれば720度(丁度2回転)といった具合に回転します。
つまり、回転させたい角度分のパルスを入力すれば、ステッピングモーターはその通りにキッチリと回転してくれるので、別で位置決め用のセンサーを用意しなくても高精度に位置決めを行うことができます。
ステッピングモーターの回転速度は、入力するパルス信号の速さに比例します。
なので、速く回転させたい場合はパルス信号を速く入力し、遅く回転させたい場合はパルス信号を遅く入力し、一定の速度で回転させたい場合は一定の速さでパルス信号を入力すればその通りに動作します。
パルス信号だけで位置制御や速度制御ができるのがステッピングモーターの最大のメリットですね。
ステッピングモーターは通電状態であれば磁力による保持力があります。
なので、別途ブレーキを準備しなくても磁力によってローターを特定の位置で固定することができます。
ただし、通電を止める(停電する)と磁力による保持力が無くなりますので、自由落下等には注意する必要があります。
例えばサーボモーターといった位置制御・速度制御ができるものと比較して、ステッピングモーターは非常に安価で入手ができます。
ものにもよりますが、安いもので数千円、場合によっては数百円で販売されていることもあります。
仕事用だけでなくプライベートの電子工作で使いたいというニーズでも、かなり安価で入手できるのがメリットです。
次に、ステッピングモーターのデメリットについてお伝えします。
ステッピングモーターはパルス信号のコントロールで自在に操れることがメリットですが、モーターに何らかの負荷が加わるなどすると思い通りに動かなくなる場合があります。
ドライバへ入力したパルス信号に追従できなくなってしまった状態のことを「脱調」と呼びます。
ステッピングモーターが脱調状態になると、ドライバからの制御は一方通行で行われているため、モーターが意図した速度や位置で回転していない場合でも、その状態を検知することができません。
負荷変動等を考慮して、正しくモーターを選定することが非常に重要です。
モーターの配線が断線している場合でも、動かなかったり逆回転したりすることがあるよ
ステッピングモーターは通常のモーターと比べて動作時の振動が大きくなります。
特に低速回転しているステッピングモーターを手に持ってみると、1パルス毎に動作する時に振動がよく手に伝わってきます。
モーターを高速回転させると振動が小さくなっていきますが、速くしすぎると脱調する可能性があるので注意が必要です。
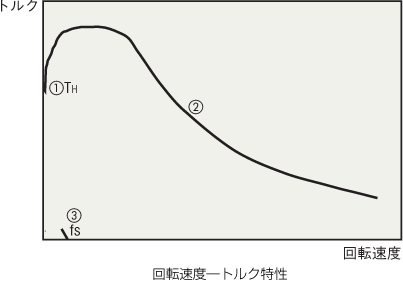
ステッピングモーターは低速〜中速域のトルクが最も高く、高速域になるほどトルクが小さくなる傾向にあります。
引用先:オリエンタルモーター(ステッピングモーターの基本特性)
上の図はステッピングモーターのトルク特性をグラフにしたもので、②の線が回転速度に対するトルクを表しています。
①は停止中の静止トルクを表しており、回転速度が0の状態でも一定のトルクで保持しています。モーターが回転するとトルクが上昇し、ある回転速度にまで達するとトルクが段々落ちてきます。
これは、高速回転するほどコイルに流れる電流が十分に増加する前に次のステップに進んでしまうためで、これによってローターを引き寄せる磁力が弱くなり、生み出されるトルクが低下してしまう原因になっています。
ステッピングモーターを高速域で使用する場合は、トルク特性に注意するようにしましょう。

以上、ステッピングモーターについて基本原理や構造などについて解説してきました。
ステッピングモーターは産業用機械や生産設備だけではなく、プリンターのヘッド部分や紙送り機構、カメラのレンズや自動改札機、トイレのウォシュレットに至るまで、様々なシーンで私達の生活を支えてくれています。
まさに「縁の下の力持ち」的な存在ですね。
この記事を通じて、少しでもステッピングモーターについての理解を深めて頂くことが出来れば幸いです。